


Page - fast robotics

![]() robotics
robotics
Echtzeitfähige Steuerung/Regelung mobiler Roboter
Koordinator
Norbert Elkmann
Fraunhofer Institut für Fabrikbetrieb und -automatisierung
Projektpartner

Fraunhofer IFF
Kuka Roboter GmbH

O&O Software
R3 - Reliable Realtime Radio Communications GmbH

TU Dresden
Kontakt
Entwicklung einer innovativen Systemlösung mit der Roboter sowohl untereinander, als auch mit ambienten Sensoren und mobilen Endgeräten durchgängig drahtlos kommunizieren können.

Zum Schutz Ihrer persönlichen Daten ist die Verbindung zu YouTube blockiert worden.
Klicken Sie auf Video laden, um die Blockierung zu YouTube aufzuheben.
Durch das Laden des Videos akzeptieren Sie die Datenschutzbestimmungen von YouTube.
Mehr Informationen zum Datenschutz von YouTube finden Sie hier Google - Datenschutzerklärung & Nutzungsbedingungen.
Problemstellung & Stand der Technik
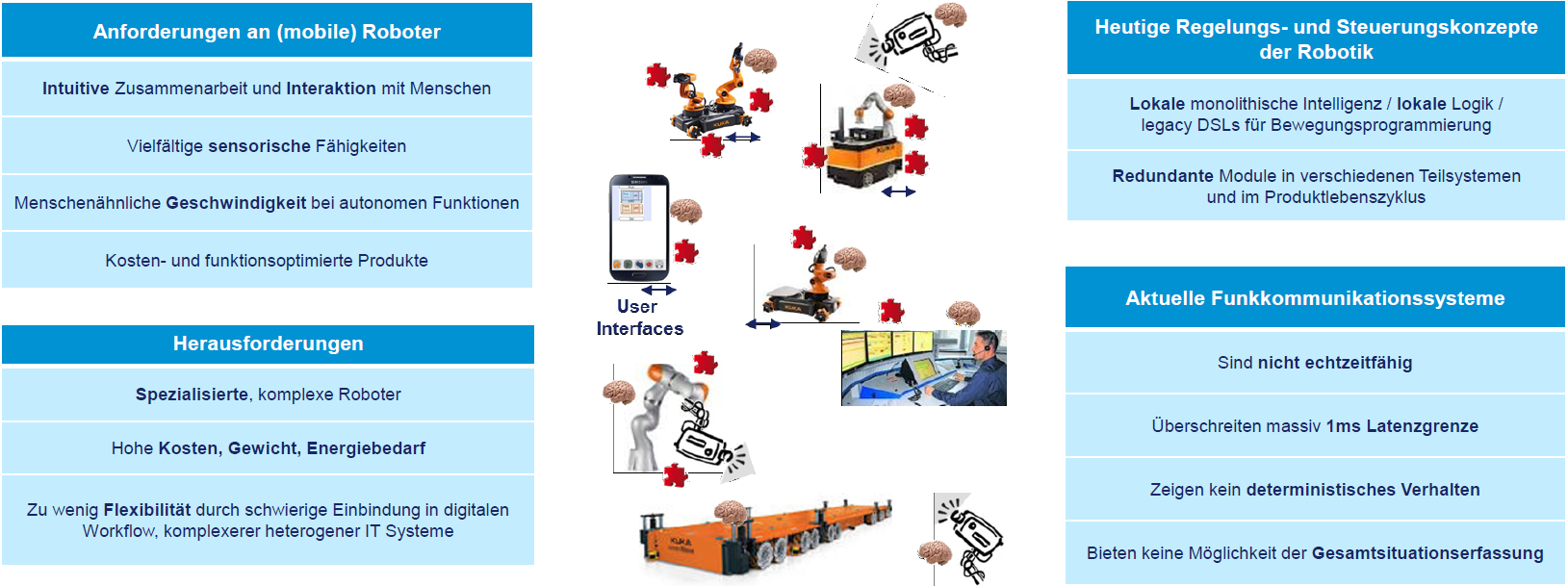
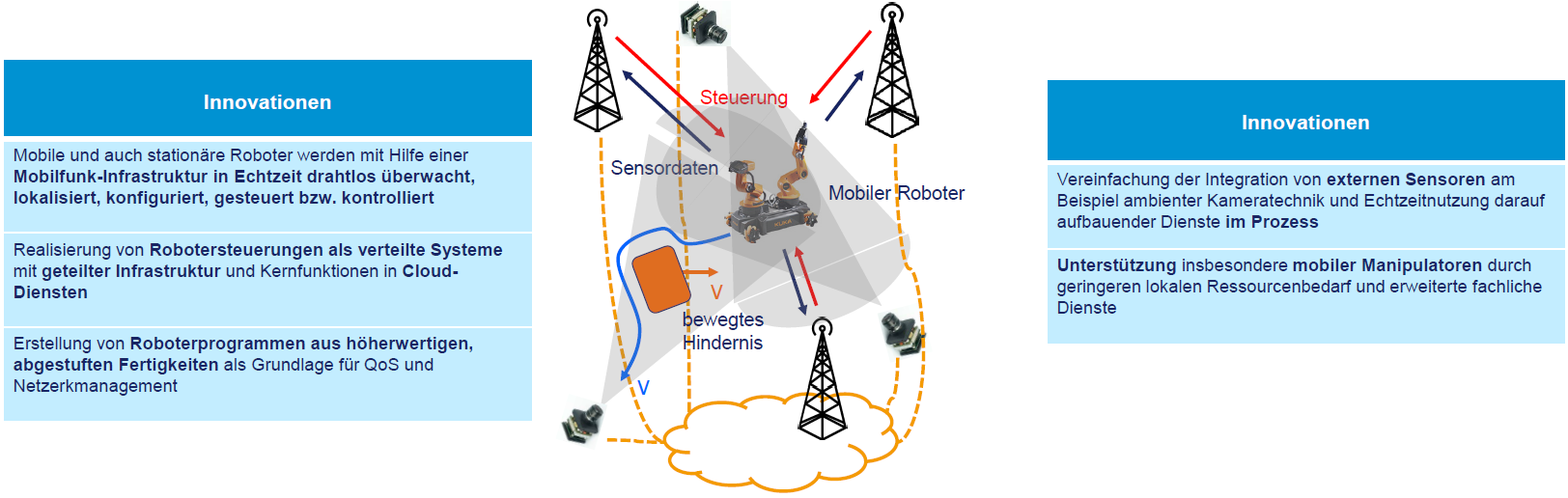
Technische Ziele & Lösungen
Das im Projekt zu schaffende Steuerungskonzept mit verteilten Algorithmen, Sensoren und Aktoren erfordert neben einer neuen verteilten Architektur insbesondere eine echtzeitfähige drahtlose Kommunikation und effiziente Koordination der Komponenten.
Innovationen & Ergebnisse
Markt und sozialer Einfluss
Gesellschaftliche Aspekte
- Entlastung des Menschen bei körperlich anstrengenden und monotonen Tätigkeiten insbesondere in Hinblick auf den demografischen Wandel
- Fähigere Roboter, u.a. auch hinsichtlich Mensch-Roboter-Kooperation bieten Perspektiven:
- Potentielle Produktivitätssteigerung
- Bessere Durchdringung weiterer Branchen mit Robotik
Projektübergreifende Kooperation
Offen für Kooperation mit anderen fast-Projekten.